
 Το Ίδρυμα Ευγενίδου, σε συνεργασία με το εργαστήριο Sea Grant του Τεχνολογικού Ινστιτούτου Μασαχουσέτης (MIT), φέρνει στην Ελλάδα το Hydrobot, ένα πρόγραμμα θαλάσσιας ρομ ποτικής βασισμένο στο Sea Perch, που είναι ένα πρωτότυπο πρόγραμμα ρομποτικής, μέσω του
Το Ίδρυμα Ευγενίδου, σε συνεργασία με το εργαστήριο Sea Grant του Τεχνολογικού Ινστιτούτου Μασαχουσέτης (MIT), φέρνει στην Ελλάδα το Hydrobot, ένα πρόγραμμα θαλάσσιας ρομ ποτικής βασισμένο στο Sea Perch, που είναι ένα πρωτότυπο πρόγραμμα ρομποτικής, μέσω του
οποίου εκπαιδεύονται οι καθηγητές – και με τη σειρά τους εκπαιδεύουν τους μαθητές τους – στην κατασκευή ενός υποβρύχιου ROV (remotely operated vehicle – τηλεκατευθυνόμενου οχήματος). Το πρόγραμμα, το οποίο ξεκίνησε στο MIT Sea Grant (MITSG) το 2003, έχει ως στόχο να κινήσει το ενδιαφέρον των μαθητών για τις επιστήμες, την τεχνολογία και τις εφαρμογές τους.
Το πρόγραμμα, το οποίο ξεκίνησε στο MIT Sea Grant (MITSG) το 2003, έχει ως στόχο να κινήσει το ενδιαφέρον των μαθητών για τις επιστήμες, την τεχνολογία και τις εφαρμογές τους.
To 2003, ο Διευθυντής του MITSG καθηγητής Χρυσόστομος Χρυσοστομίδης και ο εκπαιδευτικός συντονιστής Brandy M. Wilbur, ανέπτυξαν περαιτέρω την ιδέα αυτή σε ένα “πακέτο” που δίνει την ευκαιρία σε καθηγητές και σε μαθητές όλων των ηλικιών να κατασκευάσουν το δικό τους ROV, χρησιμοποιώντας σωλήνες PVC και άλλα σχετικά οικονομικά και εύκολα προσβάσιμα υλικά. Το πρόγραμμα SeaPerch διαδόθηκε πέρα από το MIT σε πάνω από 200 σχολεία στις ΗΠΑ, καταφέρνοντας μέχρι σήμερα, με την βοήθεια 2000 καθηγητών και δασκάλων, να εκπαιδεύσει πάνω από 26.000 μαθητές. Το SeaPerch διαδόθηκε διεθνώς σε άλλες χώρες, όπως η Κύπρος και η Γαλλία και μέσα από τη συνεργασία του Ιδρύματος Ευγενίδου με το MITSG, έρχεται τώρα και στην Ελλάδα με τη μορφή του Hydrobot. Περισσότερες πληροφορίες στο www.hydrobots.gr.
χρησιμοποιώντας σωλήνες PVC και άλλα σχετικά οικονομικά και εύκολα προσβάσιμα υλικά. Το πρόγραμμα SeaPerch διαδόθηκε πέρα από το MIT σε πάνω από 200 σχολεία στις ΗΠΑ, καταφέρνοντας μέχρι σήμερα, με την βοήθεια 2000 καθηγητών και δασκάλων, να εκπαιδεύσει πάνω από 26.000 μαθητές. Το SeaPerch διαδόθηκε διεθνώς σε άλλες χώρες, όπως η Κύπρος και η Γαλλία και μέσα από τη συνεργασία του Ιδρύματος Ευγενίδου με το MITSG, έρχεται τώρα και στην Ελλάδα με τη μορφή του Hydrobot. Περισσότερες πληροφορίες στο www.hydrobots.gr.
Το σχολείο μας συμμετέχει από το 2012 στο πρόγραμμα αυτό, επεκτείνοντας την εμπλοκή του σε προγράμματα εκπαιδευτικής ρομποτικής, δίνοντας την ευκαιρία σε περισσότερες μαθήτριες να ασχοληθούν με κατασκευές υψηλής τεχνολογίας. Το τμήμα που επιλέχθηκε να
συμμετέχει ήταν το Α4 για το σχολικό έτος 2012-13 και το τμήμα Β4 για το 2013-14. Η ομάδα Top Bots αποτελείται από τις παρακάτω μαθήτριες (με τους αντίστοιχους ρόλους στην ομάδα):
1. Αναστασία Αρμενάκη – Γιουβάνογλου - Καταγραφή εργαλείων
2. Ειρήνη Αρμενάκη – Γιουβάνογλου – Επιμέλεια κειμένων
3. Φιλοθέη Αρμενάκη – Γιουβάνογλου – Ημερολόγιο ομάδας
4. Αγγελική –Χριστινα Βασιλοπούλου – Δημιουργία logo και blog
5. Ειρήνη Υακίνθη Μπάντζου – Επεξεργασία βίντεο
6. Νεφέλη Ξενάριου - Παρουσιάστρια
7. Χριστιάνα Ράλλιου – Καταγραφή υλικών
8. Μαρίνα Σίλη - Βιντεοσκόπιση
9. Μαρία Τσιφτελή - Φωτογράφος
Η διαδικασία κατασκευής του ρομπότ περιλαμβάνει τέσσερα βασικά στάδια και δύο προαιρετικά (που τα ολοκληρώσαμε):
• Κατασκευή του σκελετού
• Συναρμολόγηση κινητήρων
• Συναρμολόγηση τηλεχειριστηρίου
• Τελική συναρμολόγηση
• Συναρμολόγηση πακέτου αισθητήρων
• Προσθήκη κάμερας και φωτισμού
Πιο αναλυτικά:
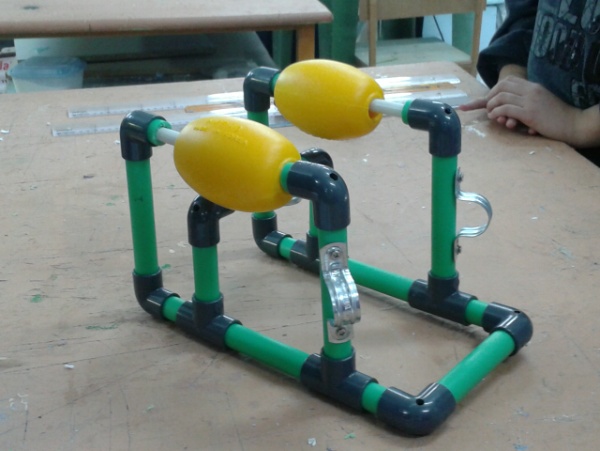 • Για την κατασκευή του σκελετού χρησιμοποιήθηκαν σωλήνες και εξαρτήματα (γωνίες και ταυ) PVC διαμέτρου 2,5 εκατοστών. Τα κομμάτια μετρήθηκαν με ακρίβεια, κόπηκαν και συγκολλήθηκαν με ειδική κόλα, σύμφωνα με το σχέδιο της κατασκευής και στο τέλος
• Για την κατασκευή του σκελετού χρησιμοποιήθηκαν σωλήνες και εξαρτήματα (γωνίες και ταυ) PVC διαμέτρου 2,5 εκατοστών. Τα κομμάτια μετρήθηκαν με ακρίβεια, κόπηκαν και συγκολλήθηκαν με ειδική κόλα, σύμφωνα με το σχέδιο της κατασκευής και στο τέλος
τοποθετήθηκαν οι δύο κίτρινοι πλωτήρες που εξασφαλίζουν την απαραίτητη άνωση. Το τελικό αποτέλεσμα της πρώτης φάσης φαίνεται στη διπλανή φωτογραφία.
 • Για τη τοποθέτηση των κινητήρων αρχικά έγινε η συγκόλληση των καλωδίων πάνω στους κινητήρες. Στη συνέχεια οι κινητήρες τοποθετήθηκαν σε μικρά πλαστικά κυλινδρικά δοχεία και σφραγίστηκαν με φυσικό κερί μέλισσας. Η διαδικασία ολοκληρώθηκε με την τοποθέτηση
• Για τη τοποθέτηση των κινητήρων αρχικά έγινε η συγκόλληση των καλωδίων πάνω στους κινητήρες. Στη συνέχεια οι κινητήρες τοποθετήθηκαν σε μικρά πλαστικά κυλινδρικά δοχεία και σφραγίστηκαν με φυσικό κερί μέλισσας. Η διαδικασία ολοκληρώθηκε με την τοποθέτηση
και τη συγκόλληση της προπέλας (και για τους τρεις κινητήρες). Τέλος, οι κινητήρες στερεώθηκαν στο σκελετό με ειδικά στηρίγματα διαμέτρου 3 εκατοστών, όπως φαίνεται στη διπλανή φωτογραφία.
 • Για τη συναρμολόγηση του τηλεχειριστηρίου αρχικά σημαδεύτηκε και τρυπήθηκε το κουτί με βάση το σχέδιο κατασκευής. Στη συνέχεια μετρήθηκαν, κόπηκαν και απογυμνώθηκαν τα καλώδια. Μετά έγιναν οι κολλήσεις στους διακόπτες που ελέγχουν την οριζόντια κίνηση του
• Για τη συναρμολόγηση του τηλεχειριστηρίου αρχικά σημαδεύτηκε και τρυπήθηκε το κουτί με βάση το σχέδιο κατασκευής. Στη συνέχεια μετρήθηκαν, κόπηκαν και απογυμνώθηκαν τα καλώδια. Μετά έγιναν οι κολλήσεις στους διακόπτες που ελέγχουν την οριζόντια κίνηση του
ρομπότ (μπροστά και πίσω), στα μπουτόν που ελέγχουν την κατακόρυφη κίνηση (πάνω και κάτω) και στο καλώδιο τροφοδοσίας. Τέλος, τοποθετήθηκαν όλα τα εξαρτήματα πάνω στο κουτί και έγινε έλεγχος καλής λειτουργίας χρησιμοποιώντας μια μπαταρία μοτοσυκλέτας 12V/10Ah.
 • Στη φάση της τελικής συναρμολόγησης τοποθετήθηκε το πλαστικό πλέγμα που χρησιμοποιείται σαν βάση στήριξης για τα εξαρτήματα που επιθυμούμε να τοποθετήσουμε πάνω στο ρομπότ. Πάνω στo πλέγμα κρεμάστηκαν τα μεταλλικά βαρίδια (ανοξείδωτες βίδες και παξιμάδια)
• Στη φάση της τελικής συναρμολόγησης τοποθετήθηκε το πλαστικό πλέγμα που χρησιμοποιείται σαν βάση στήριξης για τα εξαρτήματα που επιθυμούμε να τοποθετήσουμε πάνω στο ρομπότ. Πάνω στo πλέγμα κρεμάστηκαν τα μεταλλικά βαρίδια (ανοξείδωτες βίδες και παξιμάδια)
που χρησιμεύουν στην ευθυγράμμιση του ρομπότ μέσα στο νερό. Τέλος, έγινε η πρώτη δοκιμή πλευστότητας μέσα σε ένα μικρό ενυδρείο και οι απαραίτητες ρυθμίσεις στις θέσεις των βαριδιών. Η επόμενη δοκιμή έγινε στη θάλασσα!
 • Η συναρμολόγηση του πακέτου των αισθητήρων ήταν το πιο δύσκολο κομμάτι της κατασκευής, γιατί απαιτούσε πολύ μεγάλη ακρίβεια στις κολλήσεις. Κάθε λάθος θα είχε αποτέλεσμα την προβληματική λειτουργία του συστήματος καταμέτρησης. Αρχικά τρυπήθηκε το κουτί με
• Η συναρμολόγηση του πακέτου των αισθητήρων ήταν το πιο δύσκολο κομμάτι της κατασκευής, γιατί απαιτούσε πολύ μεγάλη ακρίβεια στις κολλήσεις. Κάθε λάθος θα είχε αποτέλεσμα την προβληματική λειτουργία του συστήματος καταμέτρησης. Αρχικά τρυπήθηκε το κουτί με
βάση τα σχέδια, στη συνέχεια κολλήθηκαν τα καλώδια στους αισθητήρες, ενώθηκαν οι αισθητήρες με την πλακέτα και τέλος τοποθετήθηκαν όλα τα εξαρτήματα στο κουτί και μονώθηκαν με ειδική κόλλα για να γίνουν απολύτως στεγανά. Οι αισθητήρες που τοποθετήθηκαν μπορούν να μετρήσουν το βάθος που βρίσκεται το ρομπότ, τη θερμοκρασία του νερού και το ποσό του φωτός που πέφτει πάνω τους.
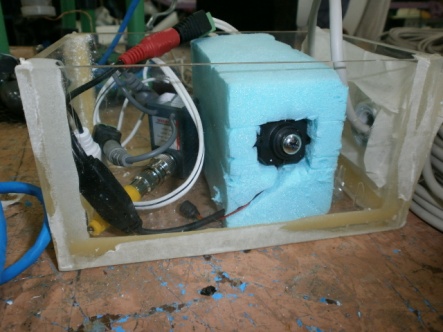 • Η προσθήκη της κάμερας και του προβολέα έδωσε παραπάνω δυνατότητες στο ρομπότ μας. Με την κάμερα (και ένα ειδικό λογισμικό) είμαστε σε θέση να παρατηρούμε και να καταγράφουμε σε βίντεο ότι «βλέπει» το ρομπότ μέσα στο νερό. Ο προβολέας χρησιμεύει στη
• Η προσθήκη της κάμερας και του προβολέα έδωσε παραπάνω δυνατότητες στο ρομπότ μας. Με την κάμερα (και ένα ειδικό λογισμικό) είμαστε σε θέση να παρατηρούμε και να καταγράφουμε σε βίντεο ότι «βλέπει» το ρομπότ μέσα στο νερό. Ο προβολέας χρησιμεύει στη
λειτουργία του ρομπότ και τη νύχτα, κάτι που δεν προβλεπόταν στον αρχικό προγραμματισμό, αλλά λειτούργησε εντυπωσιακά! Η κάμερα (μικρή κάμερα για κλειστά κυκλώματα) και η λάμπα (λάμπα led  12V/4watt) τοποθετήθηκαν μέσα σε διάφανο κουτί από plexiglass που μονώθηκε με ειδική κόλλα δύο συστατικών για σταθερότητα και απόλυτη στεγανότητα. Η σύνδεση με τον υπολογιστή για την καταγραφή των εικόνων έγινε μετασχηματιστές balun (λόγω της μεγάλης διαδρομής του σήματος) και καλώδιο UTP δεκαπέντε μέτρων. Ο έλεγχος γίνεται από δύο διακόπτες που προστέθηκαν στο κουτί ελέγχου, ένας για την ενεργοποίηση της κάμερας και ένας για τον έλεγχο της λάμπας.
12V/4watt) τοποθετήθηκαν μέσα σε διάφανο κουτί από plexiglass που μονώθηκε με ειδική κόλλα δύο συστατικών για σταθερότητα και απόλυτη στεγανότητα. Η σύνδεση με τον υπολογιστή για την καταγραφή των εικόνων έγινε μετασχηματιστές balun (λόγω της μεγάλης διαδρομής του σήματος) και καλώδιο UTP δεκαπέντε μέτρων. Ο έλεγχος γίνεται από δύο διακόπτες που προστέθηκαν στο κουτί ελέγχου, ένας για την ενεργοποίηση της κάμερας και ένας για τον έλεγχο της λάμπας.